INS(惯性导航系统)与 IMU(惯性测量装置)有什么区别?
定位(GPS)就是告诉你,你现在在哪。导航就是告诉你,如何到你想要到的位置。惯性导航你可以简单的理解成依靠惯性器件(陀螺、加速度计等)的原始数据加上固定的算法(很深奥的东西..)来输出你先要的信息,如位置,载体姿态,实时运动速度等。IMU就是惯性测量单元,它主要由惯性器件组成(陀螺、加速度计等),输出最原始的数据,如加速度、角速度等等,但是无法给出位置、姿态等信息。所以INS实际上可以简单的理解成由算法和IMU共同构成的。
什么是航空定位定向系统(POS)?
导航定位定向系统(简称:POS系统)是通过全球导航卫星系统(GNSS)获取位置数据作为初始值,通过惯导系统(IMU)获取姿态变化增量,应用卡尔曼滤波器、反馈误差控制迭代运算,生成实时导航数据。
应用POS系统可以得到移动平台位置和姿态的轨迹数据。
能够实现直接地学定位,可以减少或省略空中三角测量的地面控制点。可以与任何类型的量测类型的传感器(航摄像机、机载激光雷达(LIDAR)、高光谱成像仪、机载合成孔径雷达(SAR)和机载干涉雷达(InSAR)等)直接连接使用。
POS系统发展综述
本文通过以下四个方面简单介绍POS系统:
一、POS系统;
二、POS系统发展历程;
三、组合导航关键技术;
四、POS系统发展方向;
一、POS系统
1.POS系统的定义:
POS系统集惯性导航与卫星导航技术于一体,记录飞机飞行时空间位置及姿态信息,并采用多信息融合技术分别对 POS 系统进行实时与事后处理,获得高精度定位定向信息。
2. POS系统的组成:
POS系统包括惯导(INS)部分和差分GPS(DGPS)部分还有POS计算机处理器件和事后处理软件构成,整体见下图:
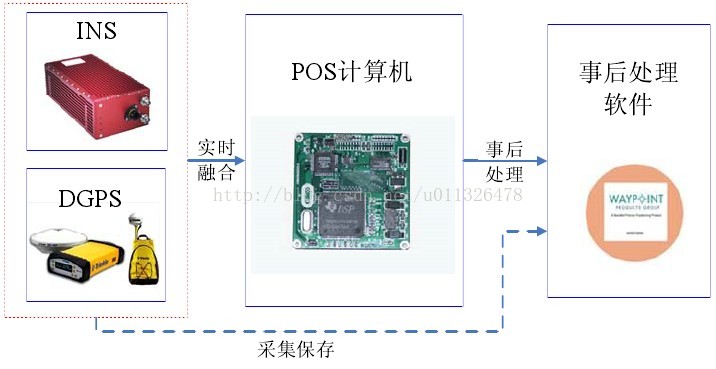
①惯性导航技术是以牛顿力学定律为基础,利用一组加速度计测量载体的加速度,利用一组陀螺仪测量载体的角运动,经过积分运算求解载体位置、速度和姿态信息的技术。根据惯性导航原理在物理平台中的实现,称为惯性导航系统;
②卫星导航系统,即 GPS 是美国国防部联合海陆空三军研制的导航系统,由空间导航卫星部分、地面监控部分和用户接收机三部分组成。它具有全天候、高精度、自动化、高效益、性能好、应用广等显著特点,能够实时地提供三维的位置、速度和 GPS 时间等信息。
3.输出:
POS系统是根据惯导系统(INS)和差分GPS获得飞机飞行的空间位置及姿态信息,为后续航空数据处理提供所需的外方位元素。
4.典型产品:
现阶段国内POS发展还处于初级阶段主要是一些高校和研究所进行相关试验研究,并没有实现什么产业化;国外POS技术比较成熟且航空业对其需求量很大,有很多公司在从事相关方面,例如:加拿大的Applanix公司,美国Z/I Imaging 公司和德国的IGI公司,典型的产品包括Applanix公司的POS AV510系统;IGI公司的AeroControl系统。
5. POS系统误差
惯性导航系统误差
初始对准误差
IMU仪表误差
计算误差与运动干扰误差
卫星导航系统误差
GPS卫星有关的误差;
GPS信号传播有关的误差
接收机设备的误差
航空摄影过程中POS系统内部不同信息源的时间同步误差
POS系统线性内插所带来的误差(时间同步误差)
二、POS系统发展历程
1.组合导航系统
早期的导航方法主要依靠磁罗盘、地标、速度表和时钟等单一功能的导航仪表来大致提供载体的路径和速度;20世纪30年代,无线电导航系统出现;20世纪40年代,德国研制成功带惯性稳定装置的V-2火箭实现第一代惯性导航系统(Inertial Navigation System,INS),20世纪60~70年代,具有自主性的惯性导航系统开始装备在航空、航天、航海的运载体上;20世纪70年代后,GPS由其全天候、精度高、性能好等特点,获得了广泛的应用;20世纪90年代以后,由于卡尔曼滤波理论的发展,将导航系统进行适当的组合,可以克服各自缺点,取长补短,大大提高精度;到现在目前广泛使用的导航方法包括:惯性导航、GPS导航、航迹推算、天文导航、无线电导航、多普勒导航、组合导航等。所有导航系统都有各自的独特优点,但单独使用又都存在一定的缺陷。下面以惯性导航系统和GPS导航为例说明
惯性导航是以牛顿力学理论为基础,利用加速度计测量载体的加速度,利用陀螺仪测量载体的角运动,经过积分运算求解载体的姿态角、载体速度和载体位置等导航参数。惯性导航系统可以仅依靠惯性传感器,而不需要与外界发生任何信息联系,就能实现全天候、全球性的3维定位、测姿和测速。因此,惯性导航系统是一种完全自主的导航系统。这一独特的优点,使其成为航空、航天和航海等领域中一种广泛使用的主要导航设备,在导航领域占有突出的地位。但是惯性导航系统也存在不足之处,其中导航误差随时间积累是其主要缺点。虽然提高惯性器件的精度可以延缓误差增长,但其误差随时间积累无法避免,这是由惯性导航原理决定的。
卫星导航系统是美国20世纪70年代联合陆海空三军共同研制的新一代空间卫星与导航定位系统,也称为GPS导航系统。其主要目的是其基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星(4颗以上)的数据就可知道接收机的具体位置,可以为陆、海、空三大领域提供实时全方位、全天候和全球性的导航服务。而且,GPS导航精度较高,具有较好的长期稳定性,目前已经成为世界上应用最广泛的定位系统,但是GPS也存在着易受干扰、载体大机动下易失锁造成GPS信号丢失等缺陷。
2.POS国内外发展:
①机载 POS 系统辅助航空摄影测量方法是20 世纪 90 年代初,由加拿大卡尔加里大学和美国俄亥俄州立大学在惯性导航技术和 GPS 技术的基础上提出的,即利用高精度差分 GPS 和惯性导航系统在航空摄影的同时获得差分 GPS 数据和姿态数据,同时数据事后处理,获取航摄像片的外方位元素。但由于当时 IMU 发展处于初期阶段,其体积大、噪声大,难以满足摄影测量的精度要求。随着军事上小型化、高精度的惯性导航系统发展,机载 POS 系统逐渐证明了其辅助航空摄影的可行性。
国外许多公司已经研制了多种型号的产品,目前生产 POS 系统的厂家主要有加拿大的 Applanix 公司(目前被 Trimble 公司收购)美国 Z/I Imaging 公司和德国 IGI 公司等。目前国内多所测绘研究机构都是采用 Applanix 的 POS AV510 系统。
②我国惯性导航与 GPS 组合技术的研究虽然起步较晚,但发展比较迅速,目前组合导航系统应用比较成熟。从上世纪 90 年代开始,航空、航天两大总公司、西北工业大学、北京航空航天大学、东南大学和南京航空航天大学等有关研究所和高校相继成立了组合导航技术研究组并做了许多研究工作。南京航空航天大学研制的基于伪距、伪距率的 GPS/INS 组合导航系统1992 年已通过省部级鉴。
机载 POS 系统的研究目前尚处于起步阶段,主要集中在一些高校和研究所,目前已经开展了相应的研究工作,并取得了一定的进展。中科院电子所联合北京航空航天大学在十五“863”的支持下,采用国内成熟的挠性 IMU 和高精度 GPS 接收机进行了机载 SAR 实时成像运动补偿用 POS 的研究,在国内首次实现亚米级(0.5m)实时成像。该系统采用基于挠性陀螺(陀螺漂移为 0.1°/h)的 IMU 与载波相位差分 GPS 组合,系统体积和质量较大。
三、组合导航关键技术;
1.实施融合:
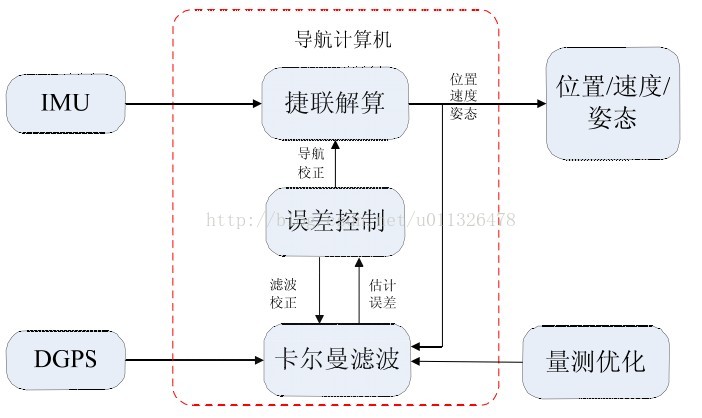
1960 年,美国学者 R. E.Kalman 首次提出了卡尔曼滤波理论(Kalman Fliter,KF)。该理论的提出极大地推动了 GPS/INS 组合导航系统的发展。卡尔曼滤波具有简单、易于实施和实时性好等优点,对于具有高斯分布噪声的线性系统,可以得到系统状态的最小方差估计,目前是工程中应用较广的滤波方法。
根据上图可以看出卡尔曼滤波器是整个 POS系统获得位置、速度、姿态等运动参数的关键。其中 IMU 数据进入导航计算机进行捷联解算,得到导航运动参数与 DGPS 数据进行融合卡尔曼滤波,滤波估计误差可以对导航参数进行校正,反过来也可以对卡尔曼滤波进行修正,针对航空摄影中的应用背景,对卡尔曼滤波进行了量测优化,提高了卡尔曼的滤波精度。
2.事后处理:
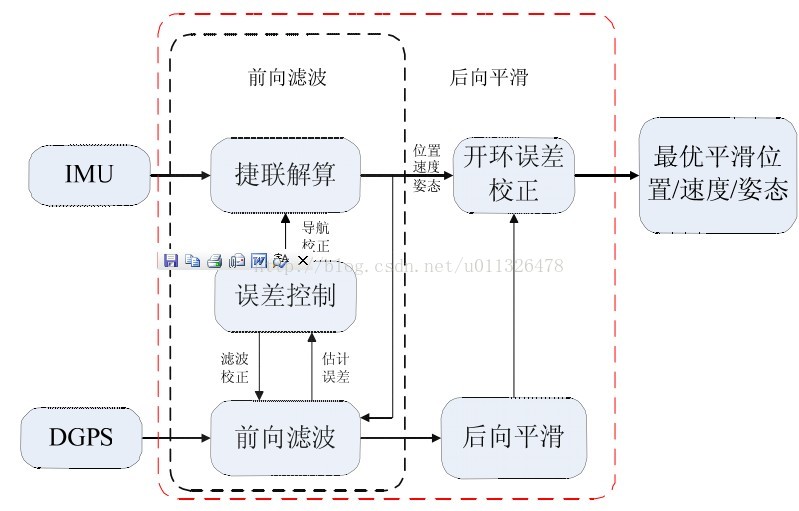
POS系统事后处理技术方案图
POS 系统辅助航空摄影,考虑到测绘没有导航的实时性要求,我们可以对 POS 系统进行导航数据的离线处理。上图算法流程可以看出:首先利用 INS/GPS 数据信息进行前向卡尔曼滤波,继而在卡尔曼滤波的基础上,再进行最优固定区间平滑滤波的算法,最后得到最优平滑位置、速度、姿态信息。
3关键技术比较:

四、POS系统发展方向
1. POS发展要求:
定位定向的实时性要求;
定位定向的高精度要求;
2. POS系统发展依托:
计算技术的发展;
GNSS技术的发展——抗干扰能力、定位精度;
POS应用的关键技术——POS系统高精度定位定向技术;
3. POS发展:
低成本;
高精度POS系统;
小型化(无人机载荷限制和INS系统小型化限制);
GNSS系统组合导航;